

アラクノフォースの SPIDAR はワイヤ駆動型力覚提示デバイスです。
SPIDAR システムの駆動部は、ワ イヤ、プーリ、DC モータで構成され、駆動部の軽量性によりほかの力覚デバイスにはない
操作時の大幅な慣性低減が可能であり、極めて忠実性の高い力覚提示を実現しています。

ワイヤ駆動による力覚提示の原理
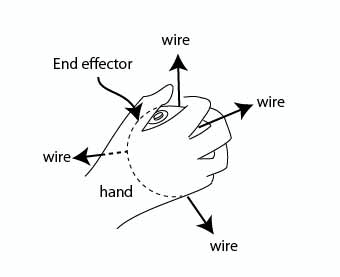
ワイヤ駆動型力覚提示装置は,ワイヤの数によって位置検出自由度と力覚提示自由度を調整すること ができます。 また、モータの配置を変えるだけで力覚提示のワークスペースを任意に変化することが可能で、これによりデスク トップ環境からヒューマンスケールまで, 高いスケーラビリティが実現可能です
大幅な慣性の低減
力覚提示デバイスは,エンドエフェクタの慣性・粘性を十分小さくしないと出力命令した力を正しく提示す ることが難しくなる特徴があるため,エンドエフェクタの慣性をできるだけ低くする必要があります。 ワイヤ駆動型力覚提示デバイスは,モータとエンドエフェクタを軽量なワイヤで接続するため,エンドエフ ェクタの慣性を限りなく小さくすることが可能です。 自由空間において何も持っていないかのように操作できる性能を透明性と呼びますが、これにより、アラ クノフォースの力覚提示デバイスは高い透明性を実現しています。
エンドエフェクタの剛性
リンク機構の力覚提示デバイスは、エンドエフェクタの剛性を上げることが難しく硬い面の提示が困難で す。 また、パラレル・リンク機構によってエンドエフェクタの剛性を高めたデバイスもありますが,エンドエフェク タの慣性が大きくなり、装置の自然な操作性が損なわれてしまいます。 ワイヤ駆動型力覚提示装置は,ワイヤを複数利用したパラレル構造のため,エンドエフェクタの剛性を高 くすることができ、さらに,独自の高解像度力覚レンダリング技術によって金属面のような硬い面の提示を 実現しています。
ウェアラブル化の実現
高性能でコストパフォーマンスに優れたHead Mounted Display(HMD)の製品化によって,極めて臨場感の高いVR/AR世界を体験することができる情報環境が整備されつつあり,
関連するビジネス・ゲーム応用の可能性が急成長しています.
HMDの併用を前提とした力覚提示装置は,ユーザが,装置の制限がなく自由に動きまわれる構造である必要があり,
物体や人物の存在感・実在性を体感できる部位に力を提示する必要があります.
また,近年のコストパフォーマンスに優れたHMDの価格に見合った価格であることが必要です.
従来の力覚デバイスは,据え置き型であるため,定位置での使用に限られており,ユーザの動作が制限されます.
さらに,機械的なリンク駆動方式のため、デバイスが重く,装置を装着した際のユーザへの負担が大きく臨場感を大きく阻害します.
また,近年のコストパフォーマンスに優れたHMDに対し,非常に高価です.
軽量なパーツで構成されたSPIDAR-Wは、通常のデバイスは実現できないウェアラブル化を実現しています。簡単に装着が可能なアクセシビリティの高いデバイスになっています。
重量も880gで、長時間の使用でも疲労なく利用できます。
肩を視点として、上腕、前腕に力を提示できるため、物体や人物の存在感・実在性を強く体感することができます.
シンプルな機構なため、構成パーツの費用を抑えることができます。